
Одним из направлений развития компании ООО «Маркинг» стало внедрение решений в области промышленной роботизации.
В 2025 году специалисты компании реализовали проект по автоматизации участка паллетизации на ОАО «Витебский ликёро-водочный завод "Придвинье"» с применением коллаборативного робота "Elite Robots CS625". Это второй реализованный проект компании в сфере коллаборативной робототехники.
Целью внедрения было не только снижение физической нагрузки на персонал, но и повышение общей эффективности работы участка за счёт автоматизации операций паллетизации, уменьшения влияния человеческого фактора, улучшения качества и точности укладки, а также обеспечения возможности работы с различными форматами продукции при минимальном времени переналадки.
Содержание
- Особенности проекта
- Техническое зрение
- Механический захват
- Коллаборативный робот CS625
- Безопасность
- Результаты внедрения
Особенности проекта
Основная особенность - это необходимость обслуживания двух независимых линий розлива в условиях ограниченного производственного пространства.
Каждая линия работает с несколькими форматами упаковок, что потребовало разработки универсального решения, способного быстро адаптироваться под разные типоразмеры без длительных простоев.
На первой линии используется три формата:
- 0,5 л цилиндрическая бутылка — 20 шт. в упаковке;
- 0,5 л ликёр (выпуклая форма) — 12 шт. в упаковке;
- 0,35 л цилиндрическая бутылка — 20 шт. в упаковке.
На второй линии также три формата:
- 0,1 л — 36 шт. в упаковке;
- 0,2 л — 21 шт. в упаковке;
- 0,35 л — 21 шт. в упаковке.
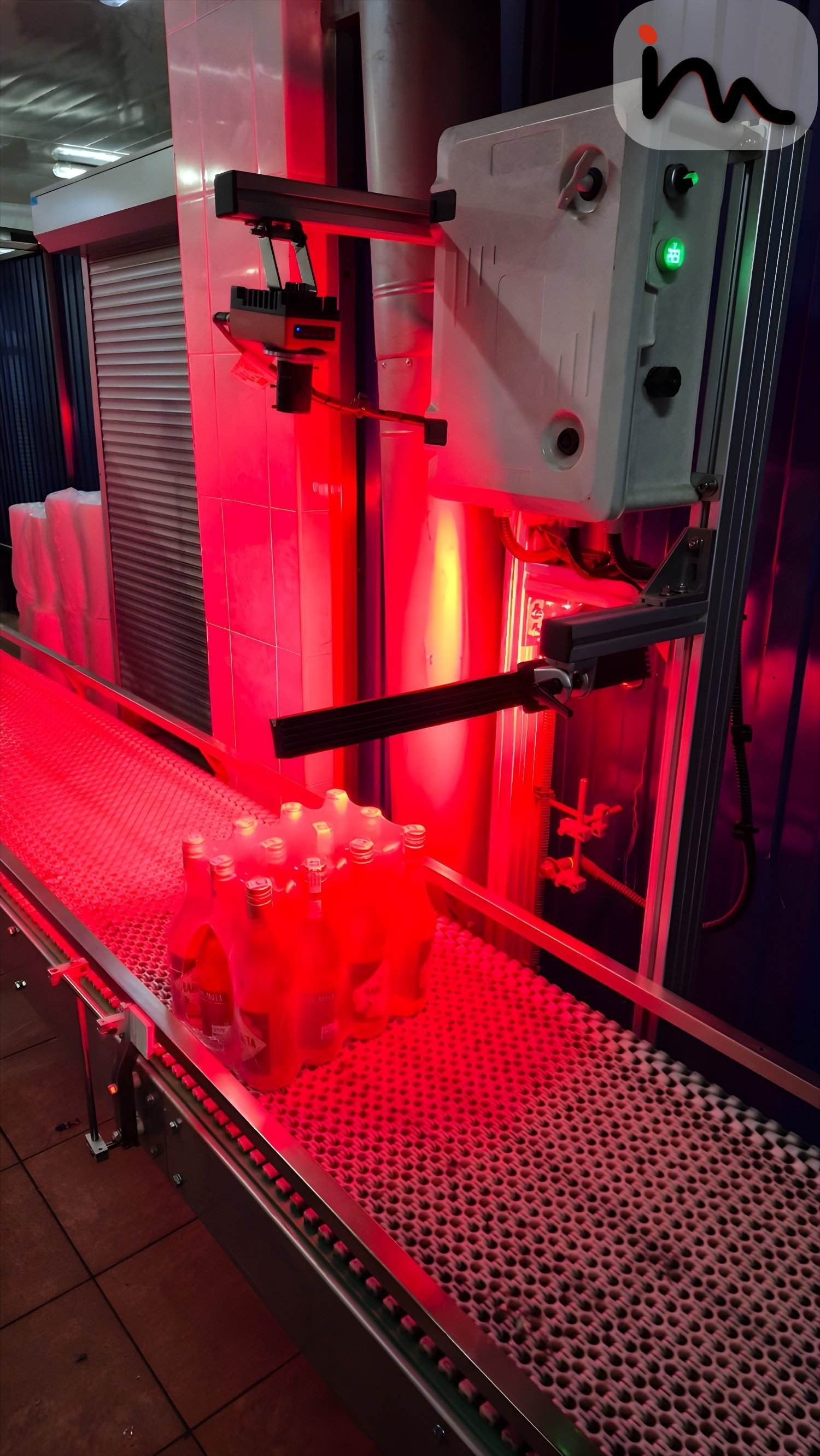
На участке была интегрирована система технического зрения для контроля групповых упаковок перед подачей в паллетайзер, что позволило исключить поступление бракованных упаковок и обеспечить стабильное качество формируемых паллет.
Техническое зрение
В каждую из линий была интегрирована система технического зрения для контроля качества групповых упаковок, поступающих на участок паллетизации.
Система выполняет следующие виды контроля:
- количество бутылок в групповой упаковке;
- геометрические параметры упаковки (габариты, симметричность);
- целостность термоусадочной плёнки — отсутствие разрывов и не запаянных участков;
- корректность ориентации упаковки перед подачей в паллетайзер;
- наличие и читаемость этикетки;
- наличие акцизной марки на горлышке бутылки.

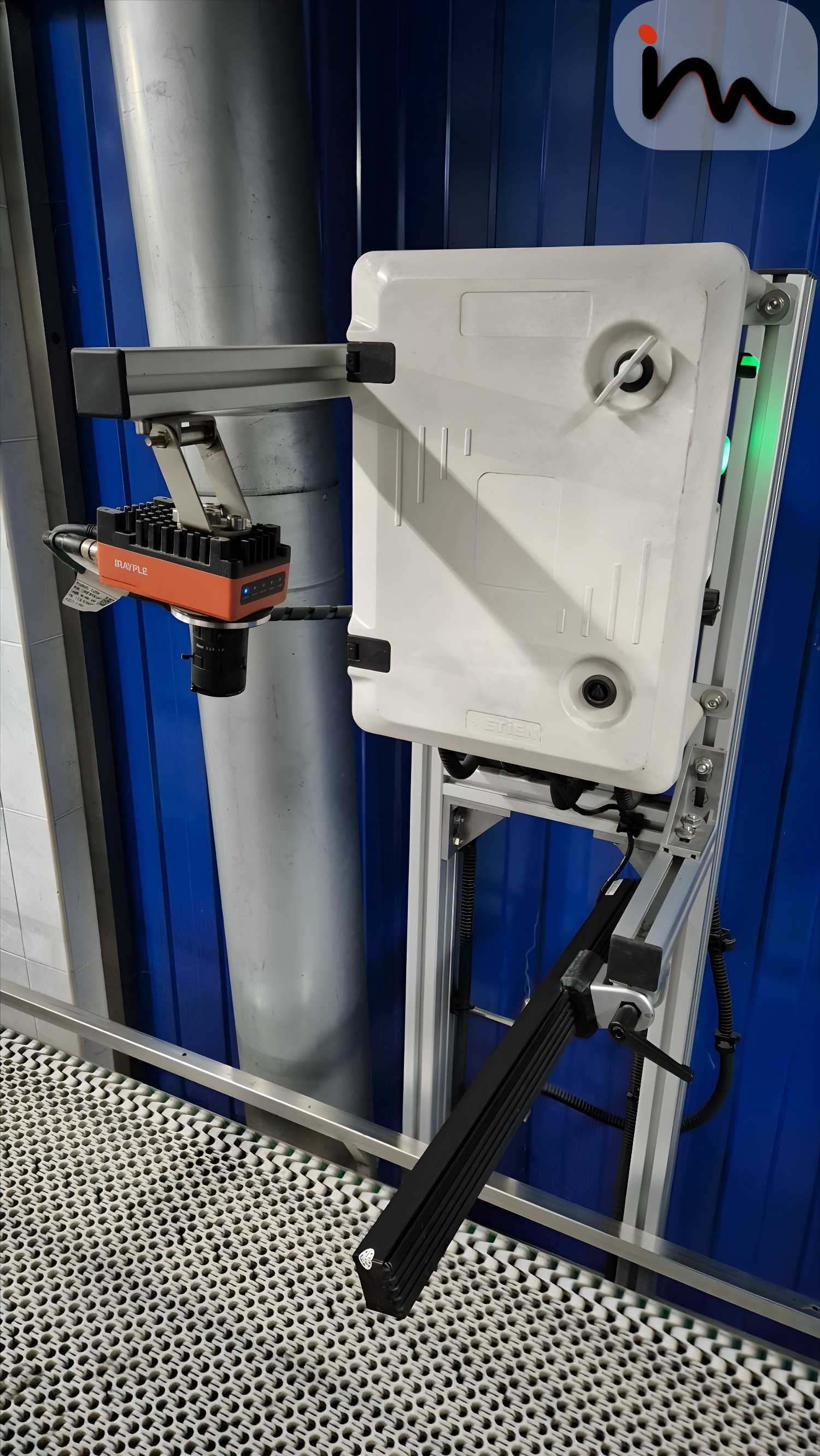
Внедрение технического зрения позволило полностью исключить наличие бракованных упаковок на участке паллетизации, снизить количество остановок робота по причине некорректной геометрии груза и обеспечить дополнительный уровень прослеживаемости продукции на линии.
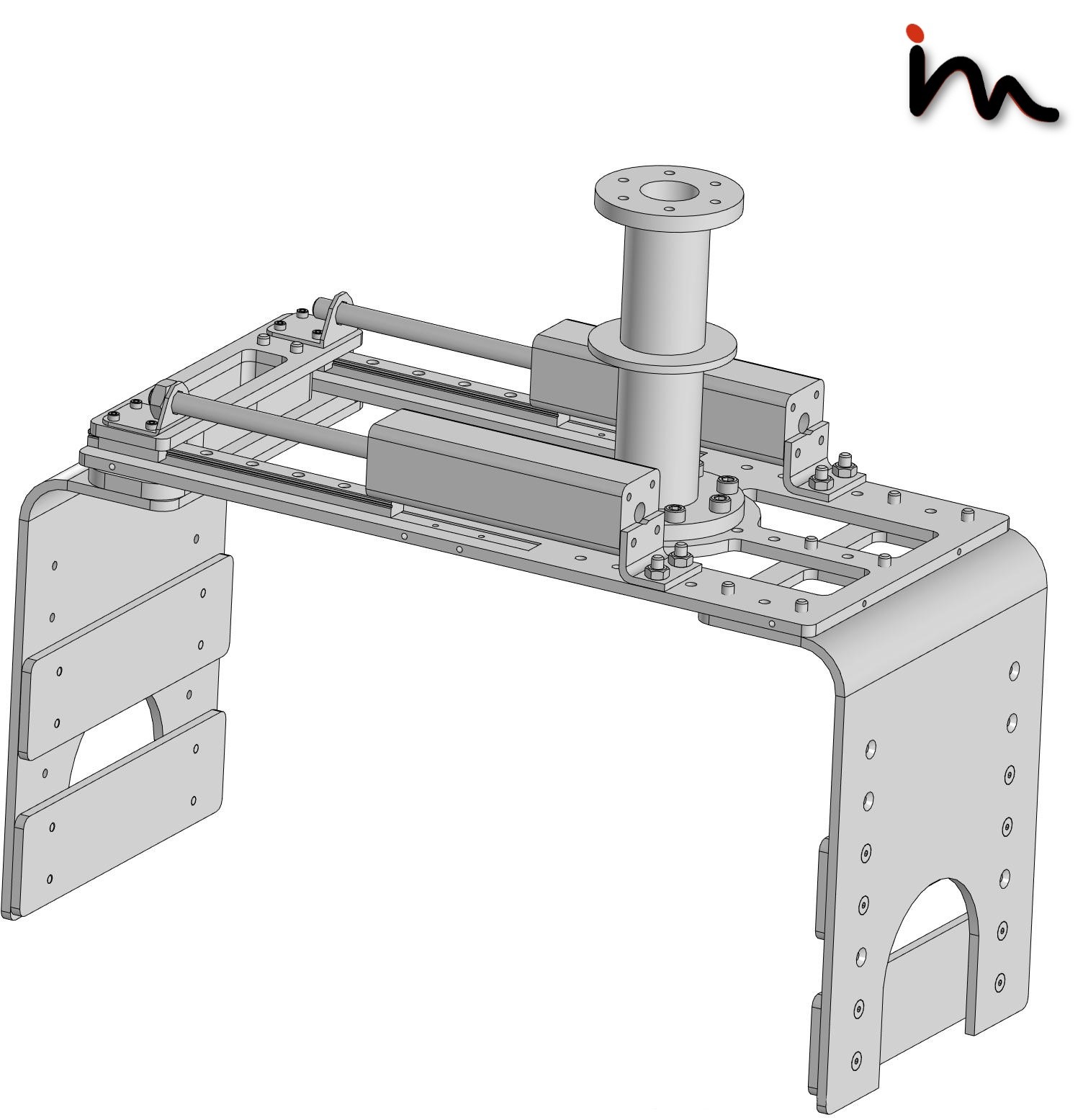
Механический захват
Для обеспечения работы с шестью и более типоразмерами был разработан универсальный механический захват.
Конструкция захвата позволяет использовать сменные компоненты в зависимости от форм-фактора групповой упаковки.
Переналадка захвата под новый формат занимает не более 2-ух минут.
Коллаборативный робот CS625
Для данного проекта нами был выбран коллаборативный робот "Elite Robots CS625" — старший представитель серии "CS" с наибольшей грузоподъёмностью в линейке.
Робот оснащён 6-осевым манипулятором и обладает следующими техническими характеристиками:
- Грузоподъёмность — 25 кг;
- Радиус действия — 1500 мм;
- Повторяемость позиционирования — ±0,08 мм;
- Максимальная скорость TCP — 3,3 м/с;
- Масса робота — 58 кг, монтажный диаметр — Ø240 мм;
- Степень защиты — IP65 (опционально IP68);
- Диапазон рабочих температур — от −10 до +50 °C.
Компактные габариты и малый вес позволили установить робота в ограниченном пространстве участка паллетизации.
Сама система управляется через промышленный контроллер, а в комплект поставки входит сенсорная панель оператора с экраном 12,1" для программирования и контроля работы.
Встроенные инструменты моделирования обеспечивают быстрое составление схем паллетирования без написания программного кода.


Безопасность
Коллаборативная концепция робота изначально предполагает совместную работу с персоналом без защитного ограждения.
Безопасность операторов обеспечивается использованием лидаров и встроенных систем контроля превышения усилий в каждом из суставов: при попадании человека в зону действия робота система автоматически снижает скорость или приостанавливает движение до выхода оператора из зоны контроля.
Это позволяет обслуживающему персоналу свободно работать рядом с роботом, не останавливая производственный процесс.
Результаты внедрения
Реализация проекта позволила:
- автоматизировать процесс паллетизации на двух линиях розлива;
- исключить ручные операции по укладке упаковок на поддоны;
- повысить стабильность и геометрическую точность формирования паллет;
- сократить влияние человеческого фактора на качество укладки;
- обеспечить быстрые переналадки для шести форматов продукции.
Коллаборативный робот выполняет все операции по укладке упаковок в соответствии с заданной схемой, формируя устойчивые и аккуратные паллеты, полностью соответствующие требованиям транспортировки и хранения.


Внедрение коботов "Elite Robots CS625" стало важным этапом развития роботизации производственных процессов на предприятии. Проект подтвердил возможность эффективного использования коботов даже в условиях ограниченного пространства и при необходимости одновременного обслуживания нескольких линий розлива.
Коллаборативные решения "Elite Robots" серии "CS" объединяют высокую точность, безопасность и простоту интеграции в существующие производственные линии, открывая новые возможности для повышения эффективности и снижения операционных затрат.